-
Safe and Optimal Variable Impedance Control via Certified Reinforcement Learning
Shreyas Kumar, Ravi Prakash
Under Review in IEEE International Conference on Robotics and Automation (ICRA) 2026
-
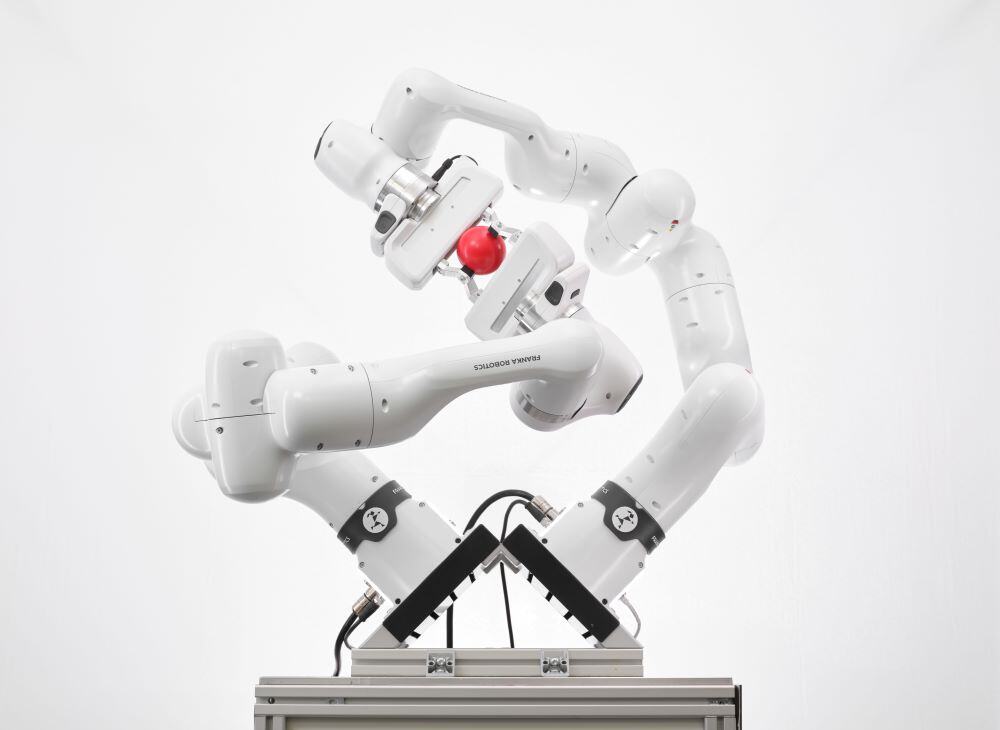
Velocity-Based Admittance-Impedance Control with Contact Compliance Modeling for Robust Dual-Arm Manipulation
Samriddhi Dubey, Yash Kashiv, Shreyas Kumar, Rajesh Kumar, Harish J. Palanthandalam-Madapusi
Under Review in IEEE International Conference on Robotics and Automation (ICRA) 2026
-
PACER: Progress-Aligned Curation for Error-Resilient Imitation Learning
Shreyas Kumar, Ravi Prakash
CoRL 2025 Workshop on Making Sense of Data in Robotics
-
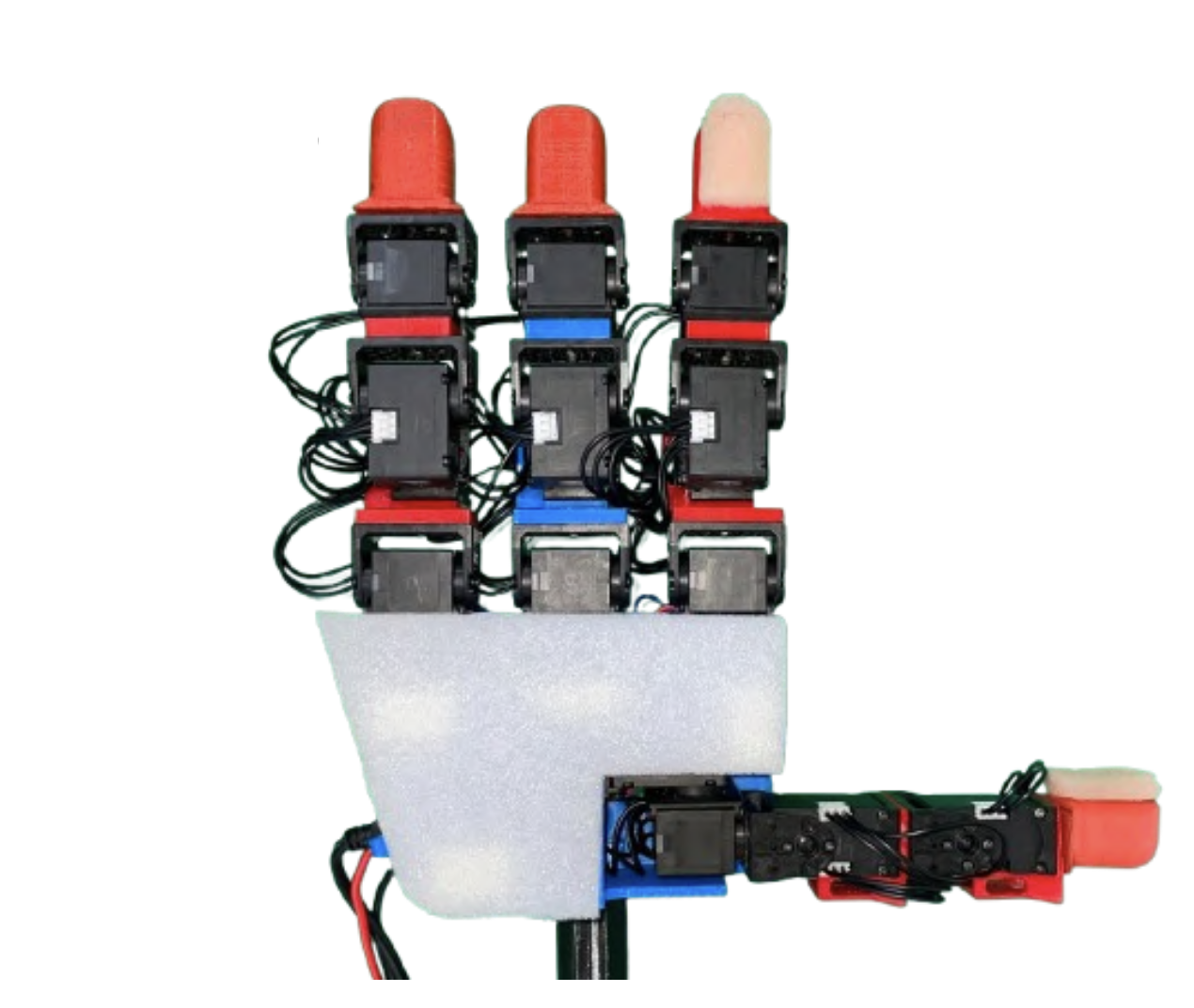
Grasping at the Edge of Instability
Barat S, Shreyas Kumar, Harish J. Palanthandalam-Madapusi
In Preparation for The International Journal of Robotics Research (2025)
-
A Coordinated Framework for Dual-Arm Snap-Fit Assembly of Delicate Components
Shreyas Kumar, Barat S, Rajesh Kumar, Harish J. Palanthandalam-Madapusi
Under Review in IEEE Transactions on Automation Science and Engineering (2025)
-
Towards Coordinated Dual-arm Snap-fit Assembly Skill for Delicate Applications
Shreyas Kumar, Barat S, Debojit Das, Siddhi Jain, Rajesh Kumar, Harish J. Palanthandalam-Madapusi
Late Breaking Report Paper at 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids)
-
Iterative Learning for Manipulation and Grasping Against Unknown Resistance Fields That is Generalizable to Arbitrary Trajectories
Barat S, Suyash Patidar, Debojit Das, Shreyas Kumar, Shail Jadav, Harish J. Palanthandalam-Madapusi
Under Review in Autonomous Robots (2024)
-
Adaptive Fuzzy Predictor Based Fast Terminal Sliding Mode Controller Design for Two-Link Robot Manipulator
Shreyas Kumar, Bishesha Dash, Roshni Maiti, Dipayan Guha
2024 Tenth Indian Control Conference (ICC)